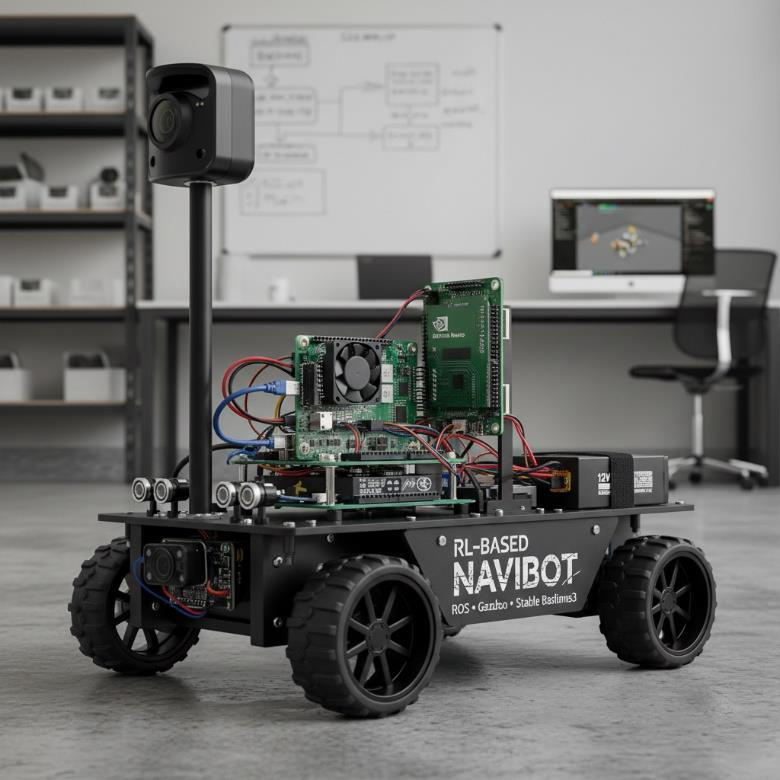
PRODUCT OVERVIEW: The SB-TEK SB-ROBO-A6 Reinforcement Learning (RL) Autonomous Mobile Robot is an advanced research-grade robotic training platform designed for universities, AI laboratories, robotics engineering departments, and industrial R&D centers. Built to support cutting-edge Deep Reinforcement Learning, Autonomous Navigation, ROS, and Sim-to-Real deployment, the system provides complete hardware and software infrastructure for hands-on RL experimentation. Using a combination of LiDAR, IMU, ultrasonic sensors, and a high-performance Raspberry Pi 4 compute unit, the robot enables students and researchers to develop intelligent agents capable of self-learning navigation strategies. With full support for OpenAI Gym, Stable Baselines3, Gazebo, and ROS, the platform ensures both simulated training and real-world experimentation in a unified framework.
SPECIFICATIONS
Hardware Components
Robot Platform
The robot chassis can be configured with a differential drive (2WD) or Mecanum wheels (4WD). It uses 12V DC geared motors with encoders for odometry. The processing unit consists of a Raspberry Pi 4 for RL processing and an Arduino for low-level motor control.
Sensors:
The robot includes an RPLIDAR A1 LiDAR with 360° scanning and 5-meter range. An MPU6050 IMU provides accelerometer and gyroscope data for dead reckoning. HC-SR04 ultrasonic sensors are included for short-range obstacle detection. A Raspberry Pi camera is optionally available for vision-based RL.
Compute Unit:
For enhanced deep RL computation, optional GPU acceleration using NVIDIA Jetson Nano is supported. Wi-Fi and Bluetooth connectivity are provided for remote monitoring via ESP32 or ROS.
Software & Algorithms:
RL Framework:
The system supports Stable Baselines3 (Py Torch) and OpenAI Gym with custom RL environments. Algorithms include Q-Learning, Deep Q-Network (DQN), and PPO (Policy Gradient).
Simulation:
Gazebo with ROS is used for virtual training before real-world deployment.
Mapping & Navigation:
The robot supports SLAM using g mapping and RL-based path planning.
Power & Connectivity:
The robot is powered by a 12V Li-ion battery providing more than one hour of runtime. Communication is managed through ROS (Robot Operating System) operating over Wi-Fi.
EXPERIMENT TASKS:
Environment Setup:
Students simulate a maze or obstacle course in Gazebo (ROS). State space is defined using LiDAR scans and position values. The action space consists of moving forward, turning left, and turning right.
RL Training (Simulation):
Training is performed using Q-Learning or DQN implemented in Python. The reward function includes +10 for reaching the goal, –1 for each step to encourage efficiency, and –5 for collision.
Real-World Deployment:
The trained model is transferred to the Raspberry Pi and tested in the physical environment with adjustment for real-world sensor noise.
Performance Metrics:
• Success rate: reaching the goal without collisions
• Training time: convergence speed in simulation
• Adaptability: performance in unknown environments
Applications:
• Warehouse logistics
• Search and rescue robots
• Autonomous delivery bots
Required Accessories:
• Pre-configured ROS and Gazebo environment
• Sample Python RL code using Stable Baselines3
• Calibration tools for LiDAR and IMU.
Installation & Training
Installation, commissioning, and operational training must be provided by the supplier. Complete technical support is included during setup.
Warranty: The system includes a 1-Year Warranty, beginning from the date of delivery.