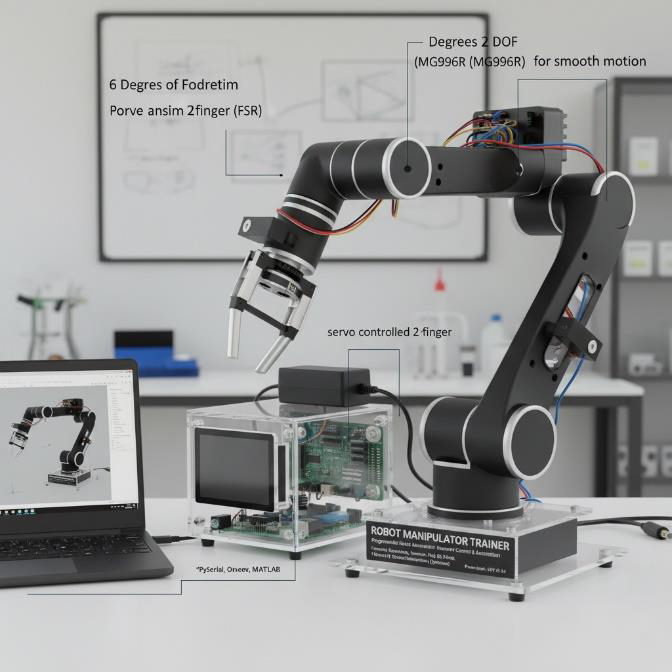
PRODUCT OVERVIEW: The SB-TEK SB-ROBO-MT1 Robot Manipulator Trainer is a versatile training platform designed for engineering laboratories to teach robotic motion control, kinematics, automation tasks, and vision-based manipulation. With a 4–6 DOF robotic arm, programmable control unit, sensor feedback modules, and PC/ROS integration, this system is ideal for hands-on robotics education, research, and automation project development. It enables students to practice forward and inverse kinematics, trajectory planning, pick-and-place operations, intelligent grasping, and computer-vision–assisted manipulation.
TECHNICAL SPECIFICATIONS
Hardware Components
Robot Arm Structure
The robot manipulator is designed with 4–6 Degrees of Freedom (DOF), using servo-based or stepper-motor-based joints to perform smooth and precise articulated motion. Servo motors such as SG90, MG996R, or Dynamixel series may be used, along with NEMA 17 stepper motors featuring a 1.8° step angle. The system includes a servo-controlled 2-finger gripper as its end-effector, with a maximum payload capacity of 500g.
Actuators:
The trainer supports a combination of high-torque servo motors and precise stepper motors, making it suitable for both lightweight tasks and accurate position control experiments.
Control Unit:
The control section includes an Arduino Mega or Raspberry Pi 4 microcontroller for high-level processing. Motor drivers such as PCA9685 for servo actuation and A4988 for stepper motors ensure reliable motor control.
Sensors:
Integrated sensors include potentiometers for joint angle feedback, Force Sensing Resistors (FSR) for grip pressure measurement, and IR or ultrasonic sensors for object detection, enhancing automation and closed-loop control capabilities.
Power Supply:
The trainer operates from a 12V DC, 5A power input. Built-in safety protection, including overcurrent and short-circuit protection, ensures safe operation during laboratory use.
Communication:
Communication interfaces include USB and UART for PC connection. Optional wireless communication such as Bluetooth or Wi-Fi using ESP32 is available for advanced control applications.
Software & Programming:
Development Platforms
The SB-ROBO-MT1 is programmable using Arduino IDE (C++), Python (with ROS and OpenCV), and MATLAB/Simulink for simulation, PID tuning, and kinematic modelling.
Key Libraries:
• ROS (Robot Operating System) for implementing inverse kinematics and motion planning
• Py Serial for PC communication with Arduino
• OpenCV for vision-based object detection and manipulation
The system supports kinematic simulation, real-time data logging, and integrated motor and sensor control through these platforms.
Experiment Name:
Programmable Robot Manipulator: Movement Control & Automation:
This experiment guides students through essential robotic control concepts, from the basics of kinematics to advanced automated manipulation.
Sub-Tasks
Forward Kinematics
• Determine end-effector position using given joint angles
• Simulate forward kinematics using MATLAB or Python.
Inverse Kinematics (IK)
• Calculate required joint angles for a target end-effector position
• Implement IK solution on Arduino or Python
Pick-and-Place Automation
• Use IR or ultrasonic sensors for object detection
• Control the gripper with force feedback to ensure safe grasping
Trajectory Planning
• Perform linear and circular path planning
• Apply PID tuning to achieve smooth joint movement and accurate trajectory tracking
Vision-Based Manipulation (Optional)
• Use OpenCV to detect object color and shape
• Execute automatic pick-and-place based on visual cues
Installation & Training: SB-TEK provides free installation, commissioning, operation, and maintenance training at the Power Electronics (PE) laboratory site, ensuring full system readiness and user capability.
Warranty: The SB-ROBO-MT1 comes with a 1-Year Warranty, effective from the date of delivery.